蘇州恩暢自動化科技有限公司 伺服電動缸|三自由度平臺|滑臺|
18121064968


2025-08-22 04:07:55
通過伺服電動缸6和第二伺服電動缸10的配合,使放置柜4可以從柜體1內部升起或者降下,達到了升降放置柜4方便使用人員放置存儲衣物以及減少占用橫向空間提高實用性和美觀感的效果,且第二伺服電動缸10固定安裝在***腔體11的內部另一側,柜體1的外表面底端固定安裝有底墊7,且底墊7設有四個,四個底墊7呈矩形分布,四個底墊7的安裝使本實用新型可以穩定放置使用,柜體1的外表面兩側開設有抬口,抬口內部設有橡膠墊,抬口的開設方便使用人員抬起本實用新型進行移動改變放置使用位置,而橡膠墊的安裝則是保護使用人員的手,防止被勒傷。工作原理:本實用新型工作中,使用人員需要利用手插入粘在抬口內將本實用新型抬動移至需要放置使用的地方,移動放置后,使用人員對本實用新型外接電源,然后打開開關使***伺服電動缸6和第二伺服電動缸10推動放置柜4伸出柜體1的內部,這樣使用人員就可以將衣物放置在內,收回時則反向操作即可,而需要對抽屜9內放置物品時,則利用手指插入拉口14內并施力向外拉動,這樣抽屜9就會抽離柜體1內,使用人員即可將物品放置在內。對于本領域技術人員而言,顯然本實用新型不限于上述示范性實施例的細節。恩暢伺服電動缸可以在惡劣環境下無故障,防護等級可以達到IP66。高速度,高精度定位,運動平穩,低噪音。蘇州庫存伺服電動缸廠家

液壓缸和氣缸的比較好替代品:伺服電動缸可以完全替代液壓缸和氣缸,并且實現環境更環保,更節能,更干凈的優點,很容易與PLC等控制系統連接,實現高精密運動控制。配置靈活性:可以提供非常靈活的安裝配置,全系列的安裝組件:安裝前法蘭,后法蘭,側面法蘭,尾部鉸接,耳軸安裝,導向模塊等;可以與伺服電機直線安裝,或者平行安裝;可以增加各式附件:限位開關,行星減速機,預緊螺母等;驅動可以選擇交流制動電機,直流電機,步進電機,伺服電機。應用:1、娛樂行業:機械人手臂及關節,動感座椅等2、行業:模擬飛行器,模擬仿真等3、汽車行業:壓裝機,測試儀器等4、工業行業:食品機械,陶瓷機械,焊接機械,升降平臺等3D復合板材高壓成型機東莞智能伺服壓力機怎么樣。 蘇州伺服電動缸的控制器在80年代中期以前,對于電驅動的機器人都是用直流伺服電機。

同步式交流伺服電動機驅動器同直流伺服電動機驅動系統相比,同步式交流伺服電動機驅動器具有轉矩/轉動慣量比高、無電刷及換向火花等優點。在工業機器人(包括噴涂機器人)中得到廣泛應用。同步式交流伺服電動機驅動器通常采用電流型脈寬調制(PWM)三相逆變同步式交流伺服電動機驅動器同直流伺服電動機驅動系統相比,同步式交流伺服電動機驅動器具有轉矩/轉動慣量比高、無電刷及換向火花等優點。在工業機器人(包括噴涂機器人)中得到廣泛應用。同步式交流伺服電動機驅動器通常采用電流型脈寬調制(PWM)三相逆變器和具有電流環為內環、速度環為外環的多環閉環控制系統,以實現對三相永磁同步伺服電動機的電流控制。根據其工作原理、驅動電流波形和控制方式的不同,可分為兩種伺服系統:1)矩形波電流驅動的永磁交流侗服系統。2)正弦波電流驅動的永磁交流伺服系統。采用矩形波電流驅動的永磁交流伺服電動機稱為無刷直流伺服電動機,采用正弦波電流驅動的永磁交流伺服電動機稱為無刷交流伺服電動機。同步式永磁交流伺服驅動器的組成如圖所示。主電路由三部分組成:整流器將工頻電源變換為直流;逆變器按照電動機轉子位置來控制交流電流;吸收來自電動機再生能量的再生功率吸收電路。
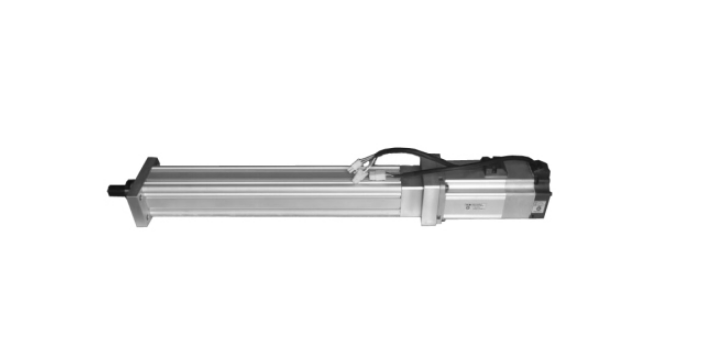
高剛性,抗沖擊力,超長壽命,操作維護簡單。伺服電動缸可以在惡劣環境下無故障,防護等級可以達到IP66。長期工作,并且實現**度,高速度,高精度定位,運動平穩,低噪音。所以可以***的應用在造紙行業,化工行業,汽車行業,電子行業,機械自動化行業,焊接行業等。低成本維護:伺服電動缸在復雜的環境下工作只需要定期的注脂潤滑,并無易損件需要維護更換,將比液壓系統和氣壓系統減少了大量的售后服務成本。液壓缸和氣缸的比較好替代品:伺服電動缸可以完全替代液壓缸和氣缸,并且實現環境更環保,更節能,更干凈的優點,很容易與PLC等控制系統連接,實現高精密運動控制。配置靈活性:可以提供非常靈活的安裝配置,全系列的安裝組件:安裝前法蘭,后法蘭,側面法蘭,尾部鉸接,耳軸安裝,導向模塊等;可以與伺服電機直線安裝,或者平行安裝;可以增加各式附件:限位開關,行星減速機,預緊螺母等;驅動可以選擇交流制動電機,直流電機,步進電機,伺服電機伺服電動缸應用編輯1、娛樂行業:機械人手臂及關節,動感座椅等2、**行業:模擬飛行器,模擬仿真等3、汽車行業:壓裝機,測試儀器等4、工業行業:食品機械,陶瓷機械,焊接機械,升降平臺等伺服電動缸應用。箱體焊接機器人工作站由弧焊機器人、焊**送絲機構、回轉雙工位變位機、工裝夾具和控制系統組成-蘇州恩暢。

氣動焊鉗兩個電極之間的開口度一般只有兩級沖程。而且電極壓力一旦調定后是不能隨意變化的。近年來出現一種新的電伺服點焊鉗,如圖4所示。焊鉗的張開和閉合由伺服電機驅動,碼盤反饋,使這種焊鉗的張開度可以根據實際需要任意選定并預置。而且電極間的壓緊力也可以無級調節。這種新的電伺服點焊鉗具有如下優點:1)每個焊點的焊接周期可大幅度降低,因為焊鉗的張開程度是由機器人精確控制的,機器人在點與點之間的移動過程、焊鉗就可以開始閉合;而焊完一點后,焊鉗一邊張開,機器人就可以一邊位移,不必等機器人到位后焊鉗才閉合或焊鉗完全張開后機器人再移動;2)焊鉗張開度可以根據工件的情況任意調整,只要不發生碰撞或干涉盡可能減少張開度,以節省焊鉗開度,以節省焊鉗開合所占的時間。3)焊鉗閉合加壓時,不僅壓力大小可以調節,而且在閉合時兩電極是輕輕閉合,減少撞擊變形和噪聲。點焊機器人FANUCR-2000iB焊接機器人焊接應用編輯焊接機器人工作站(單元)如果工件在整個焊接過程中無需變位,就可以用夾具把工件定位在工作臺面上,這種系統既是**簡單不過的了。但在實際生產中,更多的工件在焊接時需要變位,使焊縫處在較好的位置(姿態)下焊接。對于這種情況。近年來出現一種新的電伺服點焊鉗.蘇州恩暢。蘇州庫存伺服電動缸廠家
所有電機的速度都不易控制,控制速度見長的直流電機,要想準恒定定在某個轉速上還是很難很難。蘇州庫存伺服電動缸廠家
可以具體情況理解上述術語在本實用新型中的具體含義。請參閱圖1至圖3,本實用新型提供的一種實施例:一種伺服電動缸裝置,包括柜體1、放置柜4、***腔體11和第二腔體12,柜體1的內部中間固定安裝有隔板5,隔板5的底端設有***腔體11,***腔體11的內部兩側固定安裝有滑軌8,滑軌8的側面固定安裝有抽屜9,抽屜9的前表面固定安裝有前擋板13,前擋板13的前表面開設有拉口14,拉口14的開設使使用人員方便拉動抽屜9進出,達到了提供力的輸出點效果,隔板5的頂端設有第二腔體12,第二腔體12的中間設有放置柜4,放置柜4的內部設有放置架,通過設置放置柜4,因內部設有多樣的放置架,可以根據衣物的樣式來進行放置,空間利用率高,達到了可以多樣化的存儲大量衣物效果,放置柜4的兩側固定安裝有滑塊2,滑塊2滑動在滑槽3內,且滑槽3設在第二腔體12的內部兩側,通過滑槽3和滑塊2的配合,使***伺服電動缸6和第二伺服電動缸10在推動放置柜4升降時對其兩側進行穩定,達到了穩定滑動升降的效果。放置柜4的外表面底端一側連接安裝有***伺服電動缸6的輸出端,且***伺服電動缸6固定安裝在***腔體11的內部一側,放置柜4的外表面底端另一側連接安裝有第二伺服電動缸10的輸出端。蘇州庫存伺服電動缸廠家